RL笔记——《强化学习的数学原理 》
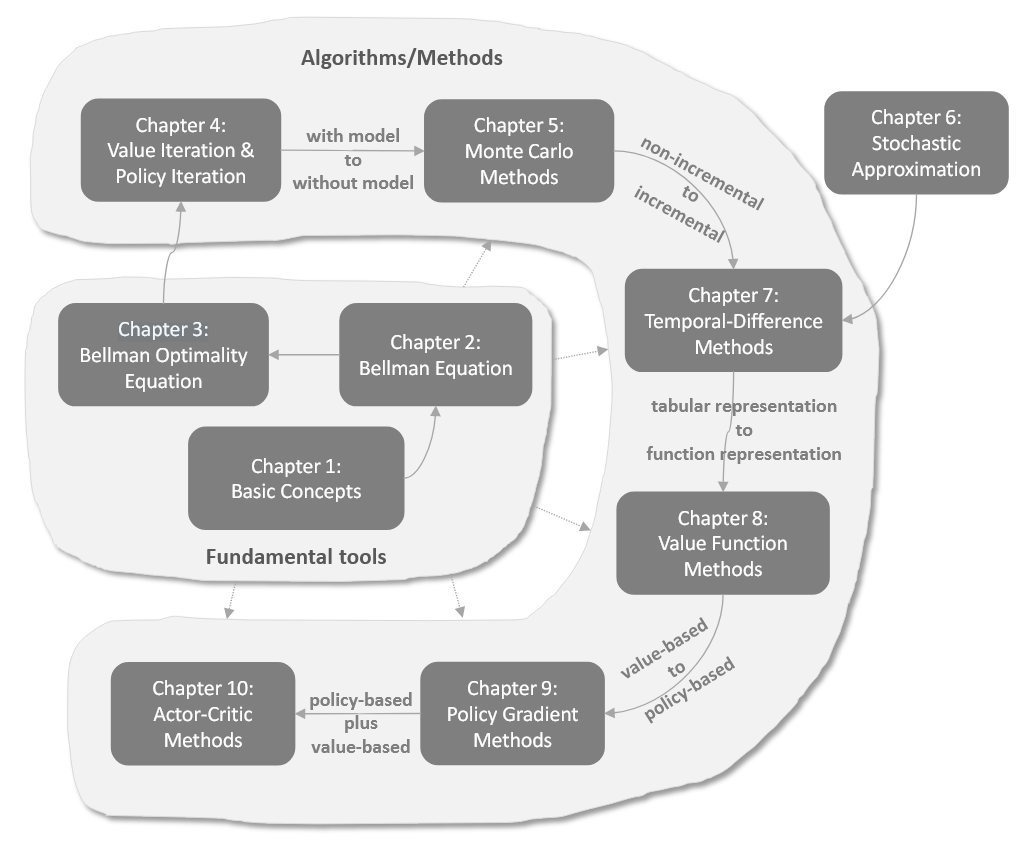
Roadmap镇楼。
State,Action
State transition
Reward
Trajectory,returns,episodes
MDP
v π ( s ) v_\pi(s) v π ( s ) π \pi π
首先,我们可以将从S t S_t S t G t G_t G t
G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + … = R t + 1 + γ ( R t + 2 + γ R t + 3 + … ) = R t + 1 + γ G t + 1 \begin{aligned}
G_t &= R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \dots \\
&= R_{t+1} + \gamma (R_{t+2} + \gamma R_{t+3} + \dots) \\
&= R_{t+1} + \gamma G_{t+1}
\end{aligned}
G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + … = R t + 1 + γ ( R t + 2 + γ R t + 3 + … ) = R t + 1 + γ G t + 1
其中,G t + 1 = R t + 2 + γ R t + 3 + … G_{t+1} = R_{t+2} + \gamma R_{t+3} + \dots G t + 1 = R t + 2 + γ R t + 3 + …
这个方程建立了 G t G_t G t G t + 1 G_{t+1} G t + 1
v π ( s ) = E [ G t ∣ S t = s ] = E [ R t + 1 + γ G t + 1 ∣ S t = s ] = E [ R t + 1 ∣ S t = s ] + γ E [ G t + 1 ∣ S t = s ] \begin{aligned}
v_{\pi}(s) &= \mathbb{E}[G_t | S_t = s] \\
&= \mathbb{E}[R_{t+1} + \gamma G_{t+1} | S_t = s] \\
&= \mathbb{E}[R_{t+1} | S_t = s] + \gamma \mathbb{E}[G_{t+1} | S_t = s]
\end{aligned}
v π ( s ) = E [ G t ∣ S t = s ] = E [ R t + 1 + γ G t + 1 ∣ S t = s ] = E [ R t + 1 ∣ S t = s ] + γ E [ G t + 1 ∣ S t = s ]
即 Bellman 方程:
v π ( s ) = E [ R t + 1 ∣ S t = s ] + γ E [ G t + 1 ∣ S t = s ] . v_{\pi}(s) = \mathbb{E}[R_{t+1} | S_t = s] + \gamma \mathbb{E}[G_{t+1} | S_t = s].
v π ( s ) = E [ R t + 1 ∣ S t = s ] + γ E [ G t + 1 ∣ S t = s ] .
接下来进行推导。
第一项 E [ R t + 1 ∣ S t = s ] \mathbb{E}[R_{t+1} | S_t = s] E [ R t + 1 ∣ S t = s ]
E [ R t + 1 ∣ S t = s ] = ∑ a ∈ A π ( a ∣ s ) E [ R t + 1 ∣ S t = s , A t = a ] = ∑ a ∈ A π ( a ∣ s ) ∑ r ∈ R p ( r ∣ s , a ) r . \begin{aligned}
\mathbb{E}[R_{t+1} | S_t = s]
&= \sum_{a \in \mathcal{A}} \pi(a | s) \mathbb{E}[R_{t+1} | S_t = s, A_t = a] \\
&= \sum_{a \in \mathcal{A}} \pi(a | s) \sum_{r \in \mathcal{R}} p(r | s, a) r.
\end{aligned}
E [ R t + 1 ∣ S t = s ] = a ∈ A ∑ π ( a ∣ s ) E [ R t + 1 ∣ S t = s , A t = a ] = a ∈ A ∑ π ( a ∣ s ) r ∈ R ∑ p ( r ∣ s , a ) r .
该公式给出了在策略 π \pi π s s s a a a p ( ⋅ ) p(\cdot) p ( ⋅ )
第二项 E [ G t + 1 ∣ S t = s ] \mathbb{E}[G_{t+1} | S_t = s] E [ G t + 1 ∣ S t = s ]
E [ G t + 1 ∣ S t = s ] = E s ′ [ E s [ G t + 1 ∣ S t = s , S t + 1 = s ′ ] ] = ∑ s ′ ∈ S E [ G t + 1 ∣ S t = s , S t + 1 = s ′ ] p ( s ′ ∣ s ) = ∑ s ′ ∈ S E [ G t + 1 ∣ S t + 1 = s ′ ] p ( s ′ ∣ s ) (due to the Markov property) = ∑ s ′ ∈ S v π ( s ′ ) p ( s ′ ∣ s ) = ∑ s ′ ∈ S v π ( s ′ ) ∑ a ∈ A p ( s ′ ∣ s , a ) π ( a ∣ s ) . \begin{aligned}
\mathbb{E}[G_{t+1} | S_t = s]
&= \mathbb{E}_{s'}[\space \mathbb{E}_s[G_{t+1} | S_t = s, S_{t+1}=s'] \space]\\
&= \sum_{s' \in \mathcal{S}} \mathbb{E}[G_{t+1} | S_t = s, S_{t+1} = s'] p(s' | s) \\
&= \sum_{s' \in \mathcal{S}} \mathbb{E}[G_{t+1} | S_{t+1} = s'] p(s' | s) \quad \text{(due to the Markov property)} \\
&= \sum_{s' \in \mathcal{S}} v_{\pi}(s') p(s' | s) \\
&= \sum_{s' \in \mathcal{S}} v_{\pi}(s') \sum_{a \in \mathcal{A}} p(s' | s, a) \pi(a | s).
\end{aligned}
E [ G t + 1 ∣ S t = s ] = E s ′ [ E s [ G t + 1 ∣ S t = s , S t + 1 = s ′ ] ] = s ′ ∈ S ∑ E [ G t + 1 ∣ S t = s , S t + 1 = s ′ ] p ( s ′ ∣ s ) = s ′ ∈ S ∑ E [ G t + 1 ∣ S t + 1 = s ′ ] p ( s ′ ∣ s ) (due to the Markov property) = s ′ ∈ S ∑ v π ( s ′ ) p ( s ′ ∣ s ) = s ′ ∈ S ∑ v π ( s ′ ) a ∈ A ∑ p ( s ′ ∣ s , a ) π ( a ∣ s ) .
第一步是如何想到:我们要转换为带有s ’ s’ s ’ s ’ s’ s ’ E \mathbb{E} E s s s
第二步利用了 E [ G t + 1 ∣ S t = s , S t + 1 = s ′ ] = E [ G t + 1 ∣ S t + 1 = s ′ ] \mathbb{E}[G_{t+1} | S_t = s, S_{t+1} = s'] = \mathbb{E}[G_{t+1} | S_{t+1} = s'] E [ G t + 1 ∣ S t = s , S t + 1 = s ′ ] = E [ G t + 1 ∣ S t + 1 = s ′ ]
将以上两式代入(3)即可得
v π ( s ) = E [ R t + 1 ∣ S t = s ] + γ E [ G t + 1 ∣ S t = s ] = ∑ a ∈ A π ( a ∣ s ) ∑ r ∈ R p ( r ∣ s , a ) r + γ ∑ a ∈ A π ( a ∣ s ) ∑ s ′ ∈ S p ( s ′ ∣ s , a ) v π ( s ′ ) = ∑ a ∈ A π ( a ∣ s ) [ ∑ r ∈ R p ( r ∣ s , a ) r + γ ∑ s ′ ∈ S p ( s ′ ∣ s , a ) v π ( s ′ ) ] , ∀ s ∈ S . \begin{aligned}
v_{\pi}(s) &= \mathbb{E}[R_{t+1} | S_t = s] + \gamma \mathbb{E}[G_{t+1} | S_t = s] \\
&= \sum_{a \in \mathcal{A}} \pi(a | s) \sum_{r \in \mathcal{R}} p(r | s, a) r
+ \gamma \sum_{a \in \mathcal{A}} \pi(a | s) \sum_{s' \in \mathcal{S}} p(s' | s, a) v_{\pi}(s') \\
&= \sum_{a \in \mathcal{A}} \pi(a | s) \left[ \sum_{r \in \mathcal{R}} p(r | s, a) r
+ \gamma \sum_{s' \in \mathcal{S}} p(s' | s, a) v_{\pi}(s') \right], \quad \forall s \in \mathcal{S}.
\end{aligned}
v π ( s ) = E [ R t + 1 ∣ S t = s ] + γ E [ G t + 1 ∣ S t = s ] = a ∈ A ∑ π ( a ∣ s ) r ∈ R ∑ p ( r ∣ s , a ) r + γ a ∈ A ∑ π ( a ∣ s ) s ′ ∈ S ∑ p ( s ′ ∣ s , a ) v π ( s ′ ) = a ∈ A ∑ π ( a ∣ s ) [ r ∈ R ∑ p ( r ∣ s , a ) r + γ s ′ ∈ S ∑ p ( s ′ ∣ s , a ) v π ( s ′ ) ] , ∀ s ∈ S .
该方程即 Bellman 方程 ,它刻画了状态值之间的关系,是设计和分析强化学习算法的基本工具。
下面求解方程。先把Bellman最优方程写成如下形式,
v π ( s ) = r π ( s ) + γ ∑ s ′ ∈ S p π ( s ′ ∣ s ) v ( s ′ ) v_{\pi}(s)=r_{\pi}(s)+\gamma \sum_{s'\in \mathcal{S}} p_{\pi}(s'|s)v(s')
v π ( s ) = r π ( s ) + γ s ′ ∈ S ∑ p π ( s ′ ∣ s ) v ( s ′ )
I − γ P π I-\gamma P_{\pi} I − γ P π
可逆
( I − γ P π ) − 1 ≥ I (I-\gamma P_{\pi})^{-1} \geq I ( I − γ P π ) − 1 ≥ I
正确性证明
( s , a ) (s,a) ( s , a )
q π ( s , a ) ≐ E [ G t ∣ S t = s , A t = a ] . q_{\pi}(s, a) \doteq \mathbb{E}[G_t | S_t = s, A_t = a].
q π ( s , a ) ≐ E [ G t ∣ S t = s , A t = a ] .
可以看出,行动值(Action value)定义为在某个状态下采取行动后可以获得的期望回报。需要注意的是,q π ( s , a ) q_\pi(s,a) q π ( s , a ) ( s , a ) (s,a) ( s , a )
Action values 和 state values的关系可以由全期望公式得到:
E [ G t ∣ S t = s ] ⏟ v π ( s ) = ∑ a ∈ A E [ G t ∣ S t = s , A t = a ] ⏟ q π ( s , a ) π ( a ∣ s ) . \underbrace{\mathbb{E}[G_t | S_t = s]}_{v_{\pi}(s)} = \sum_{a \in \mathcal{A}} \underbrace{\mathbb{E}[G_t | S_t = s, A_t = a]}_{q_{\pi}(s, a)} \pi(a | s).
v π ( s ) E [ G t ∣ S t = s ] = a ∈ A ∑ q π ( s , a ) E [ G t ∣ S t = s , A t = a ] π ( a ∣ s ) .
于是有
v π ( s ) = ∑ a ∈ A π ( a ∣ s ) q π ( s , a ) . v_{\pi}(s) = \sum_{a \in \mathcal{A}} \pi(a | s) q_{\pi}(s, a).
v π ( s ) = a ∈ A ∑ π ( a ∣ s ) q π ( s , a ) .
我们想求【最优策略】,即v π ⋆ ( s ) ≥ v π ( s ) v_{\pi\star}(s) \ge v_\pi(s) v π ⋆ ( s ) ≥ v π ( s ) s s s π \pi π
贝尔曼最优方程:
v ( s ) = max π ∑ a π ( a ∣ s ) ( ∑ r p ( r ∣ s , a ) r + γ ∑ s ′ p ( s ′ ∣ s , a ) v ( s ′ ) ) = max π ∑ a π ( a ∣ s ) q ( s , a ) s ∈ S \begin{aligned}
v(s) &= \max_{\pi} \sum_{a} \pi(a|s) \left( \sum_{r} p(r|s,a)r + \gamma \sum_{s'} p(s'|s,a)v(s') \right) \\
&= \max_{\pi} \sum_{a} \pi(a|s)q(s,a) \quad s \in \mathcal{S}
\end{aligned}
v ( s ) = π max a ∑ π ( a ∣ s ) ( r ∑ p ( r ∣ s , a ) r + γ s ′ ∑ p ( s ′ ∣ s , a ) v ( s ′ ) ) = π max a ∑ π ( a ∣ s ) q ( s , a ) s ∈ S
矩阵形式(含义是先求最优策略π \pi π
v = arg max π ( r π + γ P π v ) v=\arg\max_\pi (r_\pi + \gamma P_\pi v)
v = arg π max ( r π + γ P π v )
求解步骤:
先求优化问题:最大q值对应的策略选取概率等于1,其它等于0。可以得到f ( v ) = max π ∈ Π ( r π + γ P π v ) f(v)=\max_{\pi \in \Pi} (r_\pi + \gamma P_\pi v) f ( v ) = max π ∈ Π ( r π + γ P π v )
收缩映射定理:求解v = f ( v ) v=f(v) v = f ( v )
目的是求解Bellman最优方程。
Policy Iteration(迭代的是π k {\pi}_k π k
Step1:Policy Evaluation,给定π k \pi_k π k v π k v_{\pi_k} v π k
v π k = r π k + γ P π k v π k v_{\pi_k}=r_{\pi_k}+\gamma P_{\pi_k}v_{\pi_k}
v π k = r π k + γ P π k v π k
Step2:Policy Improvement (要注意只有状态值是π k {\pi_k} π k π \pi π
π k + 1 = arg max π ( r π + γ P π v π k ) \pi_{k+1} = \arg\max_{\pi} (r_{\pi} + \gamma P_{\pi}v_{\pi_k})
π k + 1 = arg π max ( r π + γ P π v π k )
Value Iteration(迭代的是v k v_k v k
Step1:Policy Update。给定v k v_k v k π k + 1 \pi_{k+1} π k + 1
π k + 1 = arg max π ( r π + γ P π v k ) \pi_{k+1} = \arg\max_{\pi} (r_{\pi} + \gamma P_{\pi}v_{k})
π k + 1 = arg π max ( r π + γ P π v k )
v k + 1 = r π k + 1 + γ P π k + 1 v k v_{k+1}=r_{\pi_{k+1}} + \gamma P_{\pi_{k+1}}v_k
v k + 1 = r π k + 1 + γ P π k + 1 v k
比较:从相同起点开始(将值迭代的初始值设为策略迭代第一次解出的v π 0 v_{\pi_0} v π 0
Policy iteration algorithm
Value iteration algorithm
Comments
1) Policy: π 0 \pi_0 π 0 N/A
2) Value: v π 0 = r π 0 + γ P π 0 v π 0 v_{\pi_0} = r_{\pi_0} + \gamma P_{\pi_0} v_{\pi_0} v π 0 = r π 0 + γ P π 0 v π 0 v 0 ≐ v π 0 v_0 \doteq v_{\pi_0} v 0 ≐ v π 0
3) Policy: π 1 = arg max π ( r π + γ P π v π 0 ) \pi_1 = \arg\max_{\pi} (r_{\pi} + \gamma P_{\pi} v_{\pi_0}) π 1 = arg max π ( r π + γ P π v π 0 ) π 1 = arg max π ( r π + γ P π v 0 ) \pi_1 = \arg\max_{\pi} (r_{\pi} + \gamma P_{\pi} v_0) π 1 = arg max π ( r π + γ P π v 0 ) The two policies are the same
4) Value: v π 1 = r π 1 + γ P π 1 v π 1 v_{\pi_1} = r_{\pi_1} + \gamma P_{\pi_1} v_{\pi_1} v π 1 = r π 1 + γ P π 1 v π 1 v 1 = r π 1 + γ P π 1 v 0 v_1 = r_{\pi_1} + \gamma P_{\pi_1} v_0 v 1 = r π 1 + γ P π 1 v 0 v π 1 ≥ v 1 v_{\pi_1} \geq v_1 v π 1 ≥ v 1 v π 1 ≥ v π 0 v_{\pi_1} \geq v_{\pi_0} v π 1 ≥ v π 0
5) Policy: π 2 = arg max π ( r π + γ P π v π 1 ) \pi_2 = \arg\max_{\pi} (r_{\pi} + \gamma P_{\pi} v_{\pi_1}) π 2 = arg max π ( r π + γ P π v π 1 ) π 2 ′ = arg max π ( r π + γ P π v 1 ) \pi_2' = \arg\max_{\pi} (r_{\pi} + \gamma P_{\pi} v_1) π 2 ′ = arg max π ( r π + γ P π v 1 )
⋮ \vdots ⋮ ⋮ \vdots ⋮ ⋮ \vdots ⋮ ⋮ \vdots ⋮
第四步如下图所示,本质都是迭代法求解贝尔曼最优方程,统称为Truncated Policy Iteration。值迭代只迭代了1次,策略迭代(理论上)迭代了∞ \infin ∞
v π 1 ( 0 ) = v 0 value iteration ← v 1 ← v π 1 ( 1 ) = r π 1 + γ P π 1 v π 1 ( 0 ) v π 1 ( 2 ) = r π 1 + γ P π 1 v π 1 ( 1 ) ⋮ truncated policy iteration ← v ˉ 1 ← v π 1 ( j ) = r π 1 + γ P π 1 v π 1 ( j − 1 ) ⋮ policy iteration ← v π 1 ← v π 1 ( ∞ ) = r π 1 + γ P π 1 v π 1 ( ∞ ) \begin{aligned}
v_{\pi_1}^{(0)} &= v_0 \\
\textbf{value iteration} \leftarrow v_1 \leftarrow
v_{\pi_1}^{(1)} &= r_{\pi_1} + \gamma P_{\pi_1} v_{\pi_1}^{(0)} \\
v_{\pi_1}^{(2)} &= r_{\pi_1} + \gamma P_{\pi_1} v_{\pi_1}^{(1)} \\
&\vdots \\
\textbf{truncated policy iteration} \leftarrow \bar{v}_1 \leftarrow
v_{\pi_1}^{(j)} &= r_{\pi_1} + \gamma P_{\pi_1} v_{\pi_1}^{(j-1)} \\
&\vdots \\
\textbf{policy iteration} \leftarrow v_{\pi_1} \leftarrow
v_{\pi_1}^{(\infty)} &= r_{\pi_1} + \gamma P_{\pi_1} v_{\pi_1}^{(\infty)}
\end{aligned}
v π 1 ( 0 ) value iteration ← v 1 ← v π 1 ( 1 ) v π 1 ( 2 ) truncated policy iteration ← v ˉ 1 ← v π 1 ( j ) policy iteration ← v π 1 ← v π 1 ( ∞ ) = v 0 = r π 1 + γ P π 1 v π 1 ( 0 ) = r π 1 + γ P π 1 v π 1 ( 1 ) ⋮ = r π 1 + γ P π 1 v π 1 ( j − 1 ) ⋮ = r π 1 + γ P π 1 v π 1 ( ∞ )
Policy Iteration中,每次由策略得到r , P π r, P_\pi r , P π
大数定律估计期望。
从Action value q π ( s , a ) q_\pi(s,a) q π ( s , a ) q π ( s , a ) q_\pi(s,a) q π ( s , a )
q π ( s , a ) = E [ G t ∣ S t = s , A t = a ] = E [ R t + 1 + γ R t + 2 + γ 2 R t + 3 + ⋯ ∣ S t = s , A t = a ] ≈ 1 n ∑ i n g π k ( i ) ( s , a ) \begin{aligned}
q_\pi(s,a) &= \mathbb E[G_t|S_t=s,A_t=a] \\
&= \mathbb E[R_{t+1} + \gamma R_{t+2} + \gamma^2R_{t+3} + \cdots|S_t=s,A_t=a]\\
&≈\frac{1}{n}\sum_i^n g_{\pi_k}^{(i)} (s,a)
\end{aligned}
q π ( s , a ) = E [ G t ∣ S t = s , A t = a ] = E [ R t + 1 + γ R t + 2 + γ 2 R t + 3 + ⋯ ∣ S t = s , A t = a ] ≈ n 1 i ∑ n g π k ( i ) ( s , a )
注意,MC只是一种Policy Evaluation的方法,我们还需要结合Policy Improvement选出最优策略才能形成完整的RL流程,完整算法流程如下图。
例子表明,随着episode长度的增加,出现了一个有趣的空间模式:**离目标较近的状态比离目标较远的状态更早地具有非零值。**因为从一个状态开始,智能体至少要经过一定的步数才能到达目标状态,然后得到积极的奖励。如果一个片段的长度小于期望的最小步数,则可以确定回报为零,估计的状态值也为零。不过,虽然每个episode必须足够长,但无需无限长。
上述分析涉及到一个重要的奖励设计问题:稀疏奖励 ,它是指除非到达目标,否则无法获得积极奖励的场景。稀疏的奖励设置需要较长的片段才能到达目标。当状态空间较大时,这一要求很难满足。因此,稀疏奖励问题降低了学习效率**。解决这个问题的一个简单的技术是设计非稀疏的奖励**。例如,在上述网格世界的例子中,我们可以重新设计奖励设置,使得智能体在到达目标附近的状态时可以获得较小的正奖励。通过这种方式,可以在目标周围形成一个"吸引场",使智能体更容易找到目标。更多解决方法见参考文献(原书英文版P86)。
MC的几个特性:
MC浪费了很多visit的pair(指( s , a ) (s,a) ( s , a ) ( s , a ) (s,a) ( s , a )
s 1 → a 2 s 2 → a 4 s 1 → a 2 s 2 → a 3 s 5 → a 1 … [original episode] s 2 → a 4 s 1 → a 2 s 2 → a 3 s 5 → a 1 … [subepisode starting from ( s 2 , a 4 ) ] s 1 → a 2 s 2 → a 3 s 5 → a 1 … [subepisode starting from ( s 1 , a 2 ) ] s 2 → a 3 s 5 → a 1 … [subepisode starting from ( s 2 , a 3 ) ] s 5 → a 1 … [subepisode starting from ( s 5 , a 1 ) ] \begin{aligned}
s_1 \xrightarrow{a_2} s_2 \xrightarrow{a_4} s_1 \xrightarrow{a_2} s_2 \xrightarrow{a_3} s_5 \xrightarrow{a_1} \dots & \text{[original episode]} \\
s_2 \xrightarrow{a_4} s_1 \xrightarrow{a_2} s_2 \xrightarrow{a_3} s_5 \xrightarrow{a_1} \dots & \text{[subepisode starting from } (s_2, a_4)] \\
s_1 \xrightarrow{a_2} s_2 \xrightarrow{a_3} s_5 \xrightarrow{a_1} \dots & \text{[subepisode starting from } (s_1, a_2)] \\
s_2 \xrightarrow{a_3} s_5 \xrightarrow{a_1} \dots & \text{[subepisode starting from } (s_2, a_3)] \\
s_5 \xrightarrow{a_1} \dots & \text{[subepisode starting from } (s_5, a_1)]
\end{aligned}
s 1 a 2 s 2 a 4 s 1 a 2 s 2 a 3 s 5 a 1 … s 2 a 4 s 1 a 2 s 2 a 3 s 5 a 1 … s 1 a 2 s 2 a 3 s 5 a 1 … s 2 a 3 s 5 a 1 … s 5 a 1 … [original episode] [subepisode starting from ( s 2 , a 4 ) ] [subepisode starting from ( s 1 , a 2 ) ] [subepisode starting from ( s 2 , a 3 ) ] [subepisode starting from ( s 5 , a 1 ) ]
此外,一个状态-动作对可能在一个episode中被多次访问。MC Exploring Starts中可以使用两种不同方式更新q q q
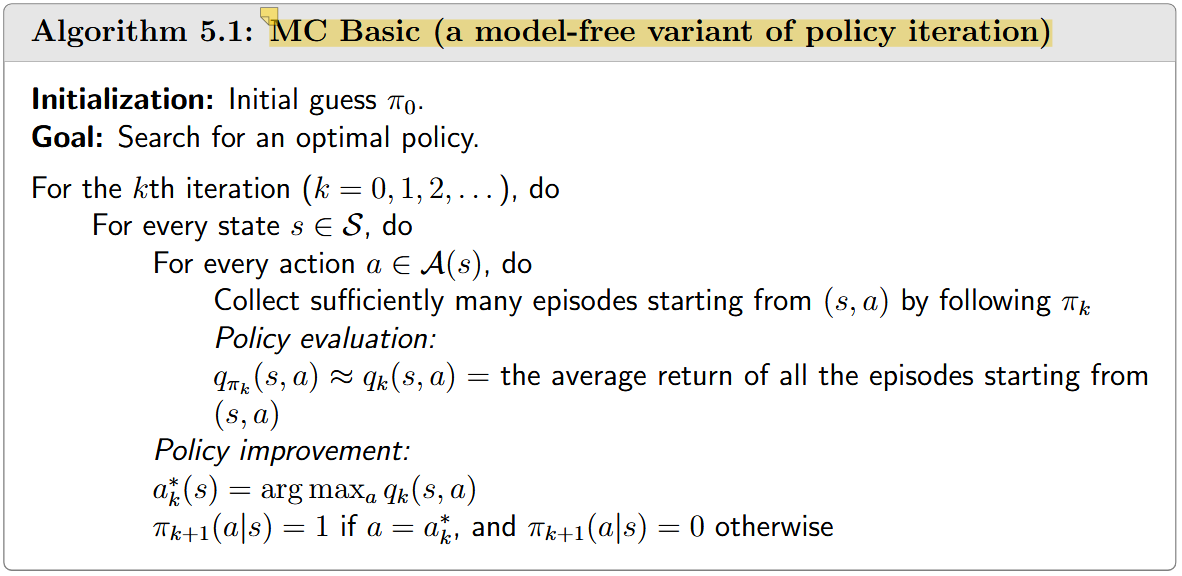
算法流程:
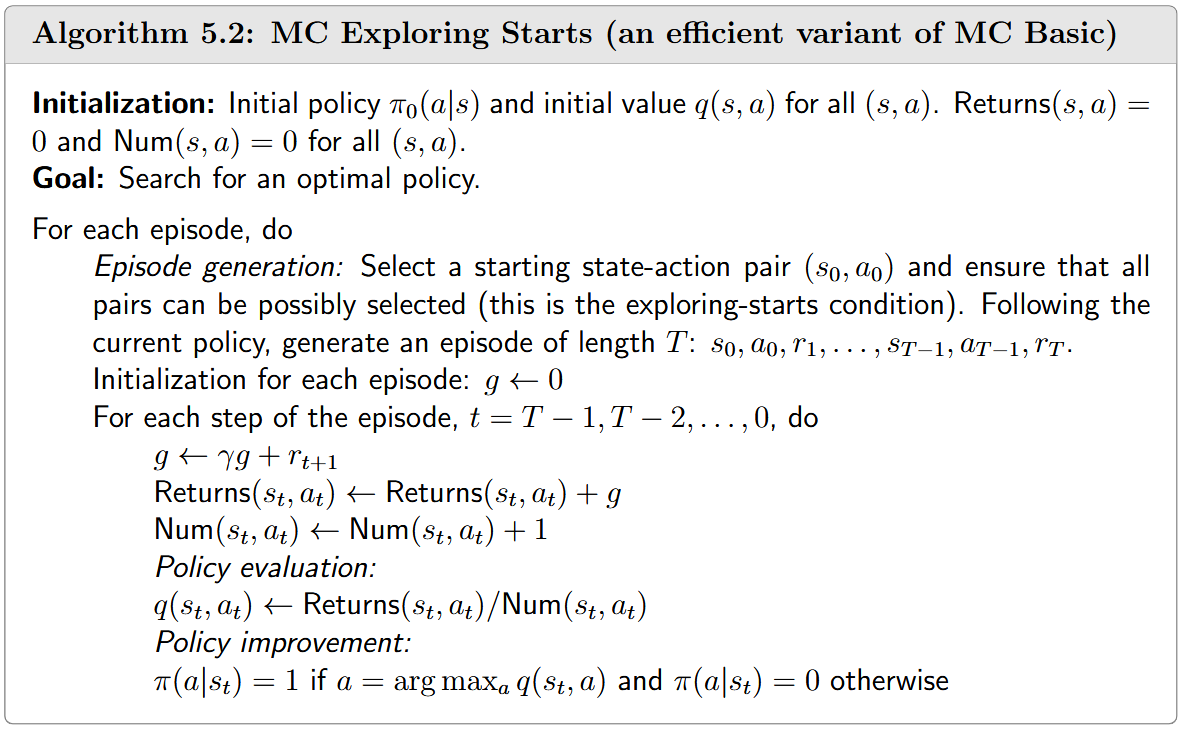
MC Basic的缺点是代理必须等到收集完所有episode后 才能更新估计值。而MC Exploring Starts可以克服这个缺点:使用单个 episode 的返回 来近似相应的 action 值。这样,当我们收到一个回合时,我们可以立即获得一个粗略的估计。然后可以逐回合改进该策略。
此外,注意Policy Evaluation部分,是用( s , a ) (s,a) ( s , a ) q q q
**如果策略在任何状态下采取任何行动的可能性为正,则该策略为软策略(soft policy)。**考虑一个极端的情况,我们只有一个episode。使用软策略,足够长的单个episode可以多次访问每个状态-动作对。因此,我们不需要从不同的 state-action 对开始生成大量 episodes,然后就可以取消 exploring starts 要求。
一种常见的软策略是 ϵ-greedy 策略。它是一种随机策略(stochastic policy),更倾向于选择贪心动作(greedy action),但仍以相同的非零概率选择其他任意动作。
其中,贪心动作 指的是**具有最高动作价值(action value)**的动作。具体来说,假设ϵ ∈ [ 0 , 1 ] \epsilon \in [0,1] ϵ ∈ [ 0 , 1 ] ϵ-greedy 策略 具有以下形式:
{ 1 − ϵ ∣ A ( s ) ∣ ( ∣ A ( s ) ∣ − 1 ) , for the greedy action, ϵ ∣ A ( s ) ∣ , for the other ∣ A ( s ) ∣ − 1 actions, \begin{cases}
1 - \frac{\epsilon}{|\mathcal{A}(s)|} (|\mathcal{A}(s)| - 1), & \text{for the greedy action,} \\
\frac{\epsilon}{|\mathcal{A}(s)|}, & \text{for the other } |\mathcal{A}(s)| - 1 \text{ actions,}
\end{cases}
{ 1 − ∣ A ( s ) ∣ ϵ ( ∣ A ( s ) ∣ − 1 ) , ∣ A ( s ) ∣ ϵ , for the greedy action, for the other ∣ A ( s ) ∣ − 1 actions,
∣ A ( s ) ∣ |\mathcal{A}(s)| ∣ A ( s ) ∣ s s s
本章介绍的算法是本书中最早引入的无模型强化学习算法 。我们首先通过研究一个重要的均值估计问题引入了蒙特卡洛(MC)估计 的概念。随后,介绍了三种基于MC的算法:
1. MC Basic 这是最简单的基于MC的强化学习算法。该算法通过用无模型的MC估计 替换策略迭代算法中的基于模型的策略评估 步骤来实现。只要样本数量足够,该算法可以收敛到最优策略和最优状态值 。
2. MC Exploring Starts 该算法是MC Basic 的一种变体。它通过在MC Basic算法的基础上,使用首次访问(first-visit)或每次访问(every-visit)策略来更高效地利用样本。
3. MC ϵ-Greedy 该算法是MC Exploring Starts 的一种变体。具体来说,在策略改进(policy improvement)步骤中,它搜索最佳的ϵ-贪心策略,而不是完全贪心策略。这样可以增强策略的探索能力(exploration ability) ,从而去除**探索起点(exploring starts)**的限制。
本章没有介绍新的强化学习算法,而是介绍了随机近似的初步方法,例如 RM 和 SGD(随机梯度下降) 算法。与许多其他寻根算法相比,**RM 算法不需要目标函数或其导数的表达式。而 SGD 算法是一种特殊的 RM 算法。**此外,本章中经常讨论的一个重要问题是均值估计。均值估计算法 (6.4) 是我们在本书中介绍的第一个随机迭代算法。我们展示了它是一种特殊的 SGD 算法。我们将在第 7 章中看到 TD 算法具有类似的表达式。最后,“随机近似”这个名称最早由Robbins和Monro在1951年使用。有关随机近似的更多信息,请参见原书参考文献[24]。
用于求解g ( w ) = 0 g(w)=0 g ( w ) = 0
w k + 1 = w k − α k g ~ ( w k , η k ) w_{k+1}=w_k-\alpha_k \tilde g(w_k,\eta_k)
w k + 1 = w k − α k g ~ ( w k , η k )
其中,g ~ ( w k , η k ) = g ( w k ) + η k \tilde g(w_k,\eta_k)=g(w_k)+\eta_k g ~ ( w k , η k ) = g ( w k ) + η k g ( w k ) g(w_k) g ( w k )
优势在于无需函数表达式。
收敛性分析。
【回顾数理方程?】
SGD是一种特殊的RM算法。
三种随机梯度算法,其实就是所用数据量的多少,类似前面值迭代、策略迭代和截断策略迭代。
w k + 1 = w k − α k 1 n ∑ i = 1 n ∇ w f ( w k , x i ) , (BGD) w k + 1 = w k − α k 1 m ∑ j ∈ I k ∇ w f ( w k , x j ) , (MBGD) w k + 1 = w k − α k ∇ w f ( w k , x k ) . (SGD) \begin{aligned}
w_{k+1} &= w_k - \alpha_k \frac{1}{n} \sum_{i=1}^{n}
\nabla_w f(w_k, x_i), \quad \text{(BGD)} \\
w_{k+1} &= w_k - \alpha_k \frac{1}{m} \sum_{j \in \mathcal{I}_k}
\nabla_w f(w_k, x_j), \quad \text{(MBGD)} \\
w_{k+1} &= w_k - \alpha_k
\nabla_w f(w_k, x_k). \quad \text{(SGD)}
\end{aligned}
w k + 1 w k + 1 w k + 1 = w k − α k n 1 i = 1 ∑ n ∇ w f ( w k , x i ) , (BGD) = w k − α k m 1 j ∈ I k ∑ ∇ w f ( w k , x j ) , (MBGD) = w k − α k ∇ w f ( w k , x k ) . (SGD)
收敛性分析。性质:在远处时随机性小,表现类似普通梯度下降,离解近时表现随机性大。
TD算法都属于SGD算法,只是估计的目标函数不一样;都是在求解Bellman方程(或最优方程)。
目标是State value。
v t + 1 ( s t ) = v t ( s t ) − α t ( s t ) [ v t ( s t ) − ( r t + 1 + γ v t ( s t + 1 ) ) ] , v t + 1 ( s ) = v t ( s ) , for all s ≠ s t , \begin{aligned}
v_{t+1}(s_t) &= v_t(s_t) - \alpha_t(s_t)\left[v_t(s_t) - \left(r_{t+1} + \gamma v_t(s_{t+1})\right)\right], \\
v_{t+1}(s) &= v_t(s), \quad \text{for all } s
\neq s_t,
\end{aligned}
v t + 1 ( s t ) v t + 1 ( s ) = v t ( s t ) − α t ( s t ) [ v t ( s t ) − ( r t + 1 + γ v t ( s t + 1 ) ) ] , = v t ( s ) , for all s = s t ,
由此形式可以得出,我们的目标是g ~ ( v t ( s t ) ) = v t ( s t ) − [ r t + 1 + γ v t ( s t + 1 ) ] = 0 \tilde g(v_t(s_t))=v_t(s_t) - \left[r_{t+1} + \gamma v_t(s_{t+1})\right]=0 g ~ ( v t ( s t ) ) = v t ( s t ) − [ r t + 1 + γ v t ( s t + 1 ) ] = 0 g ( v ) g(v) g ( v )
一些重要的 TD 算法性质如下所述。
首先,我们更仔细地研究 TD 算法的表达式。特别地,TD算法可以描述为:
v t + 1 ( s t ) ⏟ new estimate = v t ( s t ) ⏟ current estimate − α t ( s t ) [ v t ( s t ) − ( r t + 1 + γ v t ( s t + 1 ) ) ⏟ ⏞ TD Target TD error δ t ] , \underbrace{v_{t+1}(s_t)}_{\text{new estimate}} = \underbrace{v_t(s_t)}_{\text{current estimate}} - \alpha_t(s_t)
[ \overbrace{v_t(s_t) - \underbrace{\left( r_{t+1} + \gamma v_t(s_{t+1}) \right)}}_{\text{TD Target}}^{\text{TD error } \delta_t} ],
new estimate v t + 1 ( s t ) = current estimate v t ( s t ) − α t ( s t ) [ v t ( s t ) − ( r t + 1 + γ v t ( s t + 1 ) ) TD Target TD error δ t ] ,
其中
v ˉ t ≐ r t + 1 + γ v t ( s t + 1 ) \bar{v}_t \doteq r_{t+1} + \gamma v_t(s_{t+1})
v ˉ t ≐ r t + 1 + γ v t ( s t + 1 )
称为 TD Target ,而
δ t ≐ v ( s t ) − v ˉ t = v t ( s t ) − ( r t + 1 + γ v t ( s t + 1 ) ) \delta_t \doteq v(s_t) - \bar{v}_t = v_t(s_t) - (r_{t+1} + \gamma v_t(s_{t+1}))
δ t ≐ v ( s t ) − v ˉ t = v t ( s t ) − ( r t + 1 + γ v t ( s t + 1 ) )
称为 TD error 。可以看出,新估计 v t + 1 ( s t ) v_{t+1}(s_t) v t + 1 ( s t ) v t ( s t ) v_t(s_t) v t ( s t ) δ t \delta_t δ t
在更抽象的层面上,TD 误差可以解释为innovation ,它表示从经验样本( s t , r t + 1 , s t + 1 ) (s_t,r_{t+1},s_{t+1}) ( s t , r t + 1 , s t + 1 ) innovation 是许多估计问题的基础,例如卡尔曼滤波。
此外,其次,上文的TD 算法只能估计给定策略的状态值。 要找到最优策略,我们仍然需要进一步计算 action 值,然后进行Policy Improvement。
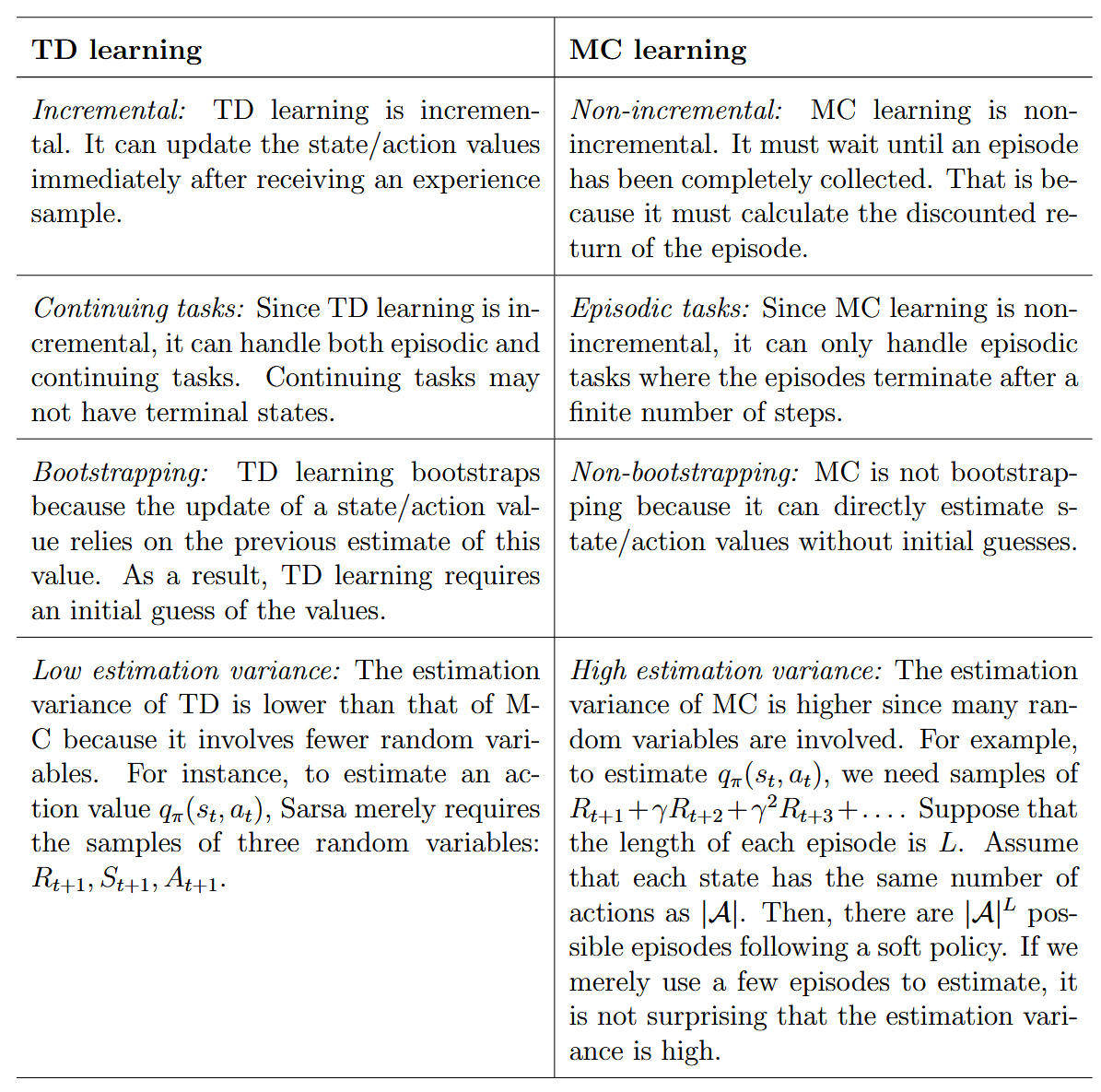
TD和MC区别总结,注意最后一点,variance部分,可以后面推导一下。
TD算法收敛性保证(对学习率的要求)
Theorem 7.1 (Convergence of TD learning). Given a policy π \pi π by the TD algorithm in (7.1), v t ( s ) v_t(s) v t ( s ) converges almost surely to v π ( s ) v_\pi(s) v π ( s ) as t → ∞ t \to \infty t → ∞ for all s ∈ S s \in \mathbb{S} s ∈ S if ∑ t α t ( s ) = ∞ \sum_t \alpha_t(s) = \infty ∑ t α t ( s ) = ∞ and ∑ t α t 2 ( s ) < ∞ \sum_t \alpha_t^2(s) < \infty ∑ t α t 2 ( s ) < ∞ for all s ∈ S s \in \mathbb{S} s ∈ S 关于学习率 α t \alpha_t α t
首先,条件 ∑ t α t ( s ) = ∞ \sum_t \alpha_t(s) = \infty ∑ t α t ( s ) = ∞ ∑ t α t 2 ( s ) < ∞ \sum_t \alpha_t^2(s) < \infty ∑ t α t 2 ( s ) < ∞ s ∈ S s \in \mathbb{S} s ∈ S t t t s s s α t ( s ) > 0 \alpha_t(s) > 0 α t ( s ) > 0 α t ( s ) = 0 \alpha_t(s) = 0 α t ( s ) = 0 ∑ t α t ( s ) = ∞ \sum_t \alpha_t(s) = \infty ∑ t α t ( s ) = ∞ s s s 探索性起点 (exploring starts)或使用探索性策略(exploratory policy),以确保每个状态-动作对都可能被访问足够多次。
其次,学习率 α t \alpha_t α t ∑ t α t 2 ( s ) < ∞ \sum_t \alpha_t^2(s) < \infty ∑ t α t 2 ( s ) < ∞ α \alpha α 仍然可以证明该算法在期望意义下收敛 [24, Section 1.5]。
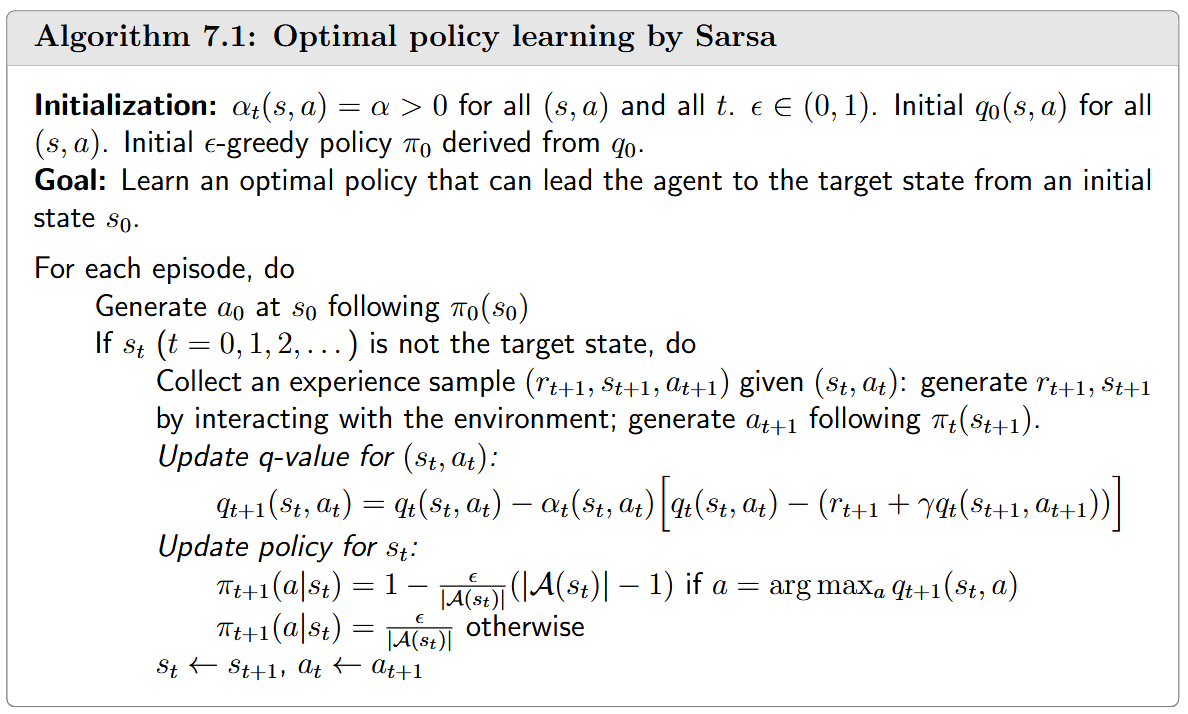
顾名思义,需要( s t , a t , r t + 1 , s t + 1 , a t + 1 ) (s_t,a_t,r_{t+1},s_{t+1},a_{t+1}) ( s t , a t , r t + 1 , s t + 1 , a t + 1 ) 只要行动一步 就可以更新一次action value(table),然后更新策略。
在数学上是求解动作值表示的Bellman方程(给定策略后,求Bellman方程得到action values)
q π ( s , a ) = E ( R + γ q π ( S ′ , A ′ ) ∣ s , a ) , for all s , a q_\pi(s,a)=\mathbb E(R+\gamma q_\pi(S',A')|s,a), \text{for all }s, a
q π ( s , a ) = E ( R + γ q π ( S ′ , A ′ ) ∣ s , a ) , for all s , a
Sarsa算法收敛性保证是由TD算法收敛性推得(Theorem 7.1)。
又是一个类似的总结,展开1~n步的关系。注意左侧所有G t ( k ) G_t^{(k)} G t ( k )
Sarsa ← G t ( 1 ) = R t + 1 + γ q π ( S t + 1 , A t + 1 ) , G t ( 2 ) = R t + 1 + γ R t + 2 + γ 2 q π ( S t + 2 , A t + 2 ) , ⋮ n-step Sarsa ← G t ( n ) = R t + 1 + γ R t + 2 + ⋯ + γ n q π ( S t + n , A t + n ) , ⋮ MC ← G t ( ∞ ) = R t + 1 + γ R t + 2 + γ 2 R t + 3 + γ 3 R t + 4 ⋯ \begin{aligned}
\text{Sarsa} \leftarrow G_t^{(1)} &= R_{t+1} + \gamma q_\pi(S_{t+1}, A_{t+1}), \\
G_t^{(2)} &= R_{t+1} + \gamma R_{t+2} + \gamma^2 q_\pi(S_{t+2}, A_{t+2}), \\
& \vdots \\
\text{n-step Sarsa} \leftarrow G_t^{(n)} &= R_{t+1} + \gamma R_{t+2} + \cdots + \gamma^n q_\pi(S_{t+n}, A_{t+n}), \\
& \vdots \\
\text{MC} \leftarrow G_t^{(\infty)} &= R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \gamma^3 R_{t+4} \cdots
\end{aligned}
Sarsa ← G t ( 1 ) G t ( 2 ) n-step Sarsa ← G t ( n ) MC ← G t ( ∞ ) = R t + 1 + γ q π ( S t + 1 , A t + 1 ) , = R t + 1 + γ R t + 2 + γ 2 q π ( S t + 2 , A t + 2 ) , ⋮ = R t + 1 + γ R t + 2 + ⋯ + γ n q π ( S t + n , A t + n ) , ⋮ = R t + 1 + γ R t + 2 + γ 2 R t + 3 + γ 3 R t + 4 ⋯
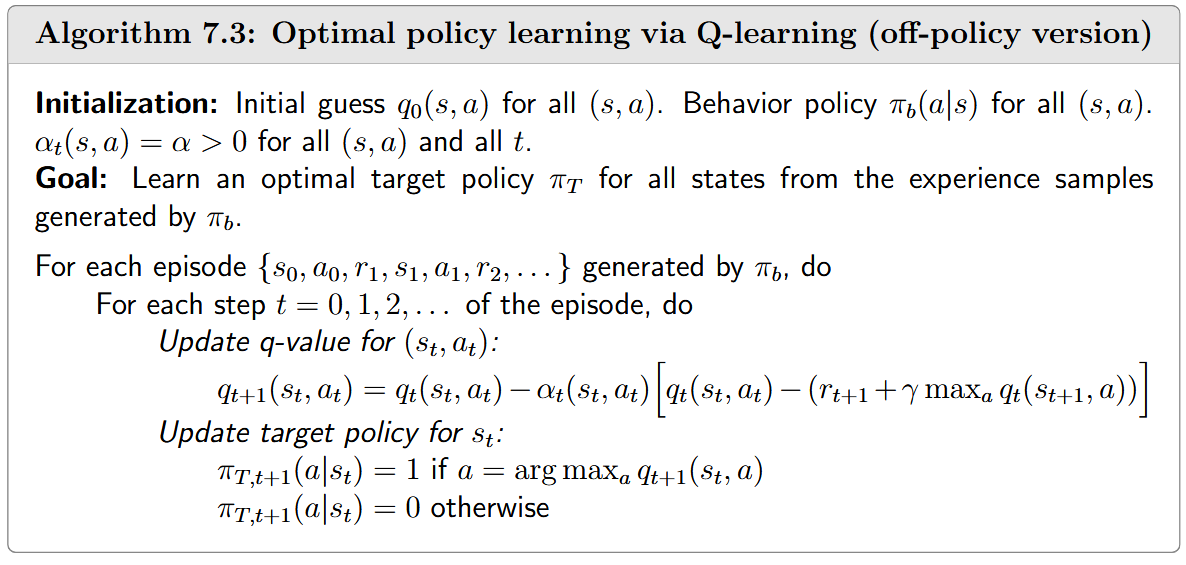
大名鼎鼎的Q-Learning,实际上就是TD Target是最优Action Value,而非Action Value。
与Sarsa相比,数学上所求解的方程唯一区别就是增加了max:(求解的不是给定策略的贝尔曼方程,而是贝尔曼最优方程)
q ( s , a ) = E ( R + γ max a q ( S t + 1 , a ) ∣ S = s , A = a ) , for all s , a q(s,a)=\mathbb E(R+\gamma \max_a q(S_{t+1},a)|S=s,A=a), \text{for all }s, a
q ( s , a ) = E ( R + γ a max q ( S t + 1 , a ) ∣ S = s , A = a ) , for all s , a
Q Learning既可以on-policy也可以off-policy(或者说,off-policy的算法也可以on-policy实现,前者包括后者),下面给出Q学习 off-policy版本实现(注意更新公式,更新公式是实现算法过程中要用的公式,而数学上求解的贝尔曼方程是数学原理。)
关于on-policy和off-policy。on-policy是收集数据和训练用的是一个策略,off-policy是收集数据和训练可用不同策略。比如MC,Sarsa就是on-policy,而Q Learning是off-policy。
根本原因是 Q-learning 是一种求解 Bellman 最优方程 的算法,而 Sarsa 用于求解给定策略的 Bellman 方程 。求解 Bellman 方程智能评估给定策略,而求解 Bellman 最优方程可以直接生成最优动作值和最优策略。
区别(来自蘑菇书)
Sarsa算法就是一个典型的同策略算法,它只用一个 π,为了兼顾探索和开发,在训练的时候会显得有点儿“胆小怕事”。它在解决悬崖寻路问题的时候,会尽可能地远离悬崖边,确保哪怕自己不小心向未知区域探索了一些,也还是处在安全区域内,不至于掉入悬崖中。
Q学习算法是一个比较典型的异策略算法,它有目标策略(target policy),用 π 来表示。此外还有行为策略(behavior policy),用 μ来表示。它分离了目标策略与行为策略,使得其可以大胆地用行为策略探索得到的经验轨迹来优化目标策略。这样智能体就更有可能探索到最优的策略。
比较Q学习算法和Sarsa算法的更新公式可以发现,Sarsa算法并没有选取最大值的操作。因此,Q学习算法是非常激进的,其希望每一步都获得最大的奖励;Sarsa算法则相对来说偏保守,会选择一条相对安全的迭代路线。
知乎张斯俊:
现在我们来总结一下整个思路: 1. Qlearning和SARSA都是基于TD(0)的。不过在之前的介绍中,我们用TD(0)估算状态的V值。而Qlearning和SARSA估算的是动作的Q值。 2. Qlearning和SARSA的核心原理,是用下一个状态St+1的V值,估算Q值。 3. 既要估算Q值,又要估算V值会显得比较麻烦。所以我们用下一状态下的某一个动作的Q值,来代表St+1的V值。 4. Qlearning和SARSA唯一的不同,就是用什么动作的Q值替代St+1的V值。 - SARSA 选择的是在St同一个策略产生的动作。 - Qlearning 选择的是能够产生最大的Q值的动作。
我觉得上面说的有问题,SARSA,QLearning的数学依据是求解Bellman方程,并非他所说的“代替”
Tabluar -> Function based
IMP
一般对w w w
经验回放区作用
保证均匀分布 => 因为DQN中,我们在求解期望,其中假设了( s , a ) (s, a) ( s , a )
提升采样利用率(同一个( s , a ) (s, a) ( s , a )
把QLearning中的Q表格替换成NN。
Double DQN 射击移动靶->射击固定靶
DQN有一个显著的问题:Q值估计偏大 ,是因为每次都取max。解决的办法:双Q网络。实际上,DQN本身实现的时候就是2个Q网络——一个Target Network,一个不断更新的Network。(每隔一定步数同步他俩)
因此将DDQN技巧应用于DQN,只需要改一行代码。即:
r t + max a Q ( s t + 1 , a ) → r t + Q ′ ( s t + 1 , arg max a Q ( s t + 1 , a ) ) r_t+\max_a Q(s_{t+1}, a) \rightarrow r_t+Q'(s_{t+1},\arg\max_a Q(s_{t+1},a))
r t + a max Q ( s t + 1 , a ) → r t + Q ′ ( s t + 1 , arg a max Q ( s t + 1 , a ) )
现在我们用每次会更新的Q网络当做Q Q Q Q ′ Q' Q ′
数学原理,为什么可以?(直观理解是Q Q Q Q ′ Q' Q ′
选取d ( s ) d(s) d ( s ) π \pi π
d ( s ) d(s) d ( s ) π \pi π
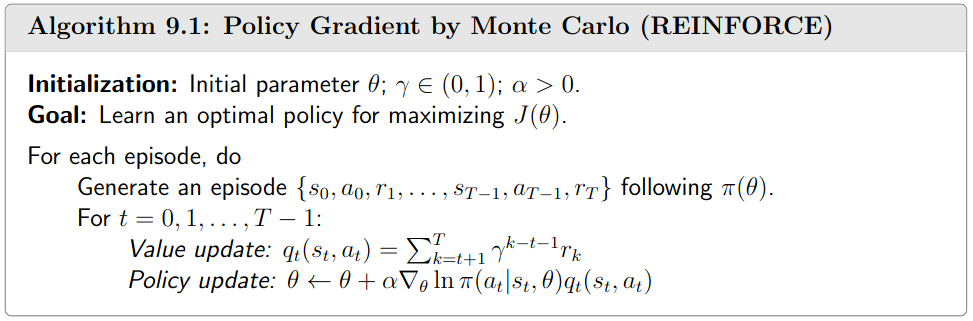
注意,策略梯度只是一种更新策略的方法,因此还要结合Value Update(或者说,我们还是需要求q π q_\pi q π
Policy+MC=REINFORCE算法
蘑菇书笔记 (来自李宏毅RL课程)使用了轨迹形式的表示,但实际和上面的Metric2是等价的。
∇ θ J ( θ ) = E τ [ R ( τ ) ∇ θ log p θ ( τ ) ] \nabla_{\theta}J(\theta) = \mathbb{E}_\tau [R(\tau)\nabla_{\theta}\log p_{\theta}(\tau)]
∇ θ J ( θ ) = E τ [ R ( τ ) ∇ θ log p θ ( τ ) ]
而赵世钰书中Metric2使用的是状态-动作形式:
∇ θ J ( θ ) = E s ∼ η , a ∼ π θ [ ∇ θ log π θ ( a ∣ s ) ⋅ q π ( s , a ) ] \nabla_{\theta}J(\theta) = \mathbb{E}_{s\sim\eta, a\sim\pi_{\theta}}[\nabla_{\theta}\log \pi_{\theta}(a|s) \cdot q_{\pi}(s, a)]
∇ θ J ( θ ) = E s ∼ η , a ∼ π θ [ ∇ θ log π θ ( a ∣ s ) ⋅ q π ( s , a ) ]
详细推导过程:(注意其中用到了∇ f ( x ) = f ( x ) ∇ log f ( x ) \nabla f(x)=f(x)\nabla \log f(x) ∇ f ( x ) = f ( x ) ∇ log f ( x )
∇ R ˉ θ = ∑ τ R ( τ ) ∇ p θ ( τ ) = ∑ τ R ( τ ) p θ ( τ ) ∇ p θ ( τ ) p θ ( τ ) = ∑ τ R ( τ ) p θ ( τ ) ∇ log p θ ( τ ) = E τ ∼ p θ ( τ ) [ R ( τ ) ∇ log p θ ( τ ) ] ≈ 1 N ∑ n = 1 N R ( τ n ) ∇ log p θ ( τ n ) = 1 N ∑ n = 1 N ∑ t = 1 T n R ( τ n ) ∇ log p θ ( a t n ∣ s t n ) \begin{aligned}
\nabla \bar{R}_\theta
&= \sum_\tau R(\tau) \nabla p_\theta(\tau) \\
&= \sum_\tau R(\tau) p_\theta(\tau) \frac{\nabla p_\theta(\tau)}{p_\theta(\tau)} \\
&= \sum_\tau R(\tau) p_\theta(\tau) \nabla \log p_\theta(\tau) \\
&= \mathbb{E}_{\tau \sim p_\theta(\tau)} \left[ R(\tau) \nabla \log p_\theta(\tau) \right] \\
&\approx \frac{1}{N} \sum_{n=1}^{N} R(\tau^n) \nabla \log p_\theta(\tau^n) \\
&= \frac{1}{N} \sum_{n=1}^{N} \sum_{t=1}^{T_n} R(\tau^n) \nabla \log p_\theta(a_t^n \mid s_t^n)
\end{aligned}
∇ R ˉ θ = τ ∑ R ( τ ) ∇ p θ ( τ ) = τ ∑ R ( τ ) p θ ( τ ) p θ ( τ ) ∇ p θ ( τ ) = τ ∑ R ( τ ) p θ ( τ ) ∇ log p θ ( τ ) = E τ ∼ p θ ( τ ) [ R ( τ ) ∇ log p θ ( τ ) ] ≈ N 1 n = 1 ∑ N R ( τ n ) ∇ log p θ ( τ n ) = N 1 n = 1 ∑ N t = 1 ∑ T n R ( τ n ) ∇ log p θ ( a t n ∣ s t n )
将Value Function Approximation引入Policy Gradient方法,就得到了AC方法。
第一个:QAC算法